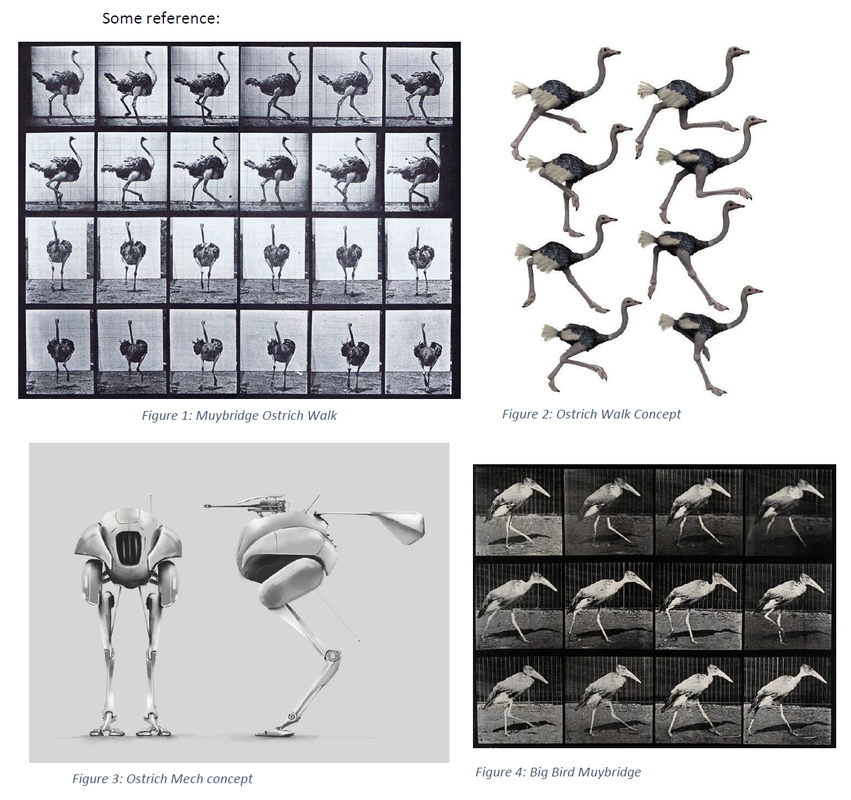
 Ornithological reference of Ostrich/Bird Movement (some images grabbed from Google) Intro: For this project, we needed to explore and capture a "complex prop"; in addition to this, we were also required to explore relation-constraints within MotionBuilder. This meant having the translation data of one of the props influence something else within the scene. The props themselves needed to have some sort of hinge, or motion, that could be captured and rigged within MotionBuilder. Our group decided to use an Ostrich leg as our influenced movement. The pieces were combined together via cardboard, tape, and some simple tied knots. The rig itself was held up by a "T"-handle in the middle, and the feet were strapped into the bottom. 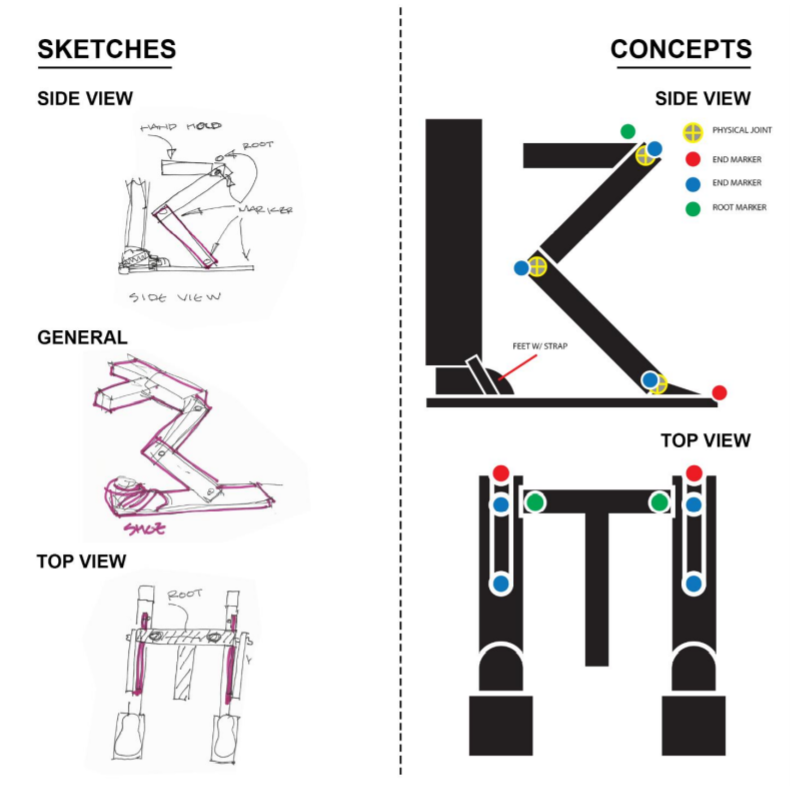 Example of complex-prop design inspired by ornithological anatomy. Capturing, Rigging, and Constraints: The figure above is the general layout we proposed for the creation of the prop. As for the markers and the placement of each object, The feet and the "hips" were two separate objects. We had considered placing a marker on the "knee" joint between the hips and the feet, but we found this provided unnecessary information--there ended up only being a need for the feet/hips, as there was the ability to create a IK/FK joint-chain by hand within MotionBuilder. We also had the addition of an umbrella to simulate some sort of head movement from the walking motion. The handle and the umbrella portion were each separate objects, both could be used for further exploration of constraints if desired. After bringing in the data, it was cleaned and I began to attach some geometry to simulate an abstracted bird-like form. I attempted to use brightly colored geometry to signify the bones/joints of the rig. The video is documentation of the capture: Outcomes: I decided to work with an example that didn't require too much editing in terms of fixing the data. This was the simple walk. I translated the original position of the head to be more above the hips, rather than far out in front. The geometry I attached informed how the rest of the rig could be created. I added in a knee joint between the hips and the feet, allowing for a realistic chain-IK to be used. This chain-IK also had a pole vector, allowing the knee to be consistently pointed towards the back. After getting the legs to function correctly, I decided to experiment with an antenna. This antenna used relation constraints that were influenced by the vertical translation of both left/right feet. As one or the other moved upwards, this constraint was mapped towards the scale of the cube closest to the head of the creature. As the cube scaled, due to the feet, the rest of the cubes also did the same--but, the other cubes were only influenced by the first cube. This also used a "3D Damping" relation, allowing a flow of information to be delayed from cube to cube. It sways and shrinks with cartoon-like exaggeration. Moving on from experimenting with the antenna, I added a dynamic neck chain. This was created using joints, nulls, and spheres, to simulate a swinging neck as the creature moved across the screen. The beginning joint was attached to the head of the creature, while the end was attached to the hips. The final experiment was to create a dumbbell-like bowl geometry, and place it inside of the torus object. This model was then suspended between the torus with a rigid body attribute; then I placed dynamic cubes inside to simulate objects moving within the structure. If I had more time, I would go back and add more cubes to the mix, almost like the creature was unintentionally leaving a trail of cubes behind it as it traverses across the screen. Below you can find a video of the examples described: Comments are closed.
|
|||
